


近期,浙江大学流体动力与机电系统国家重点实验室发布了重磅综述论文《A Comprehensive Review of Humanoid Robots》,该论文系统梳理了人形机器人的发展历程、关键技术、应用场景及未来趋势。作为国内最具影响力的人形机器人研究团队之一,浙大团队基于其在人形机器人研发过程中的深厚积累,结合对全球技术发展的前瞻性观察,为业界提供了一份极具参考价值的技术路线图。
论文不仅详细分析了从ASIMO到Atlas、从Optimus到Figure 01等国际代表性机器人的技术演进,还重点介绍了包括浙大"悟空"系列在内的中国原创人形机器人成果,全面展现了人形机器人从机械结构到智能控制的最新进展。以下是对这篇重要论文内容的翻译整理和精要解读,希望能为行业同仁提供有益参考。
1. 引言
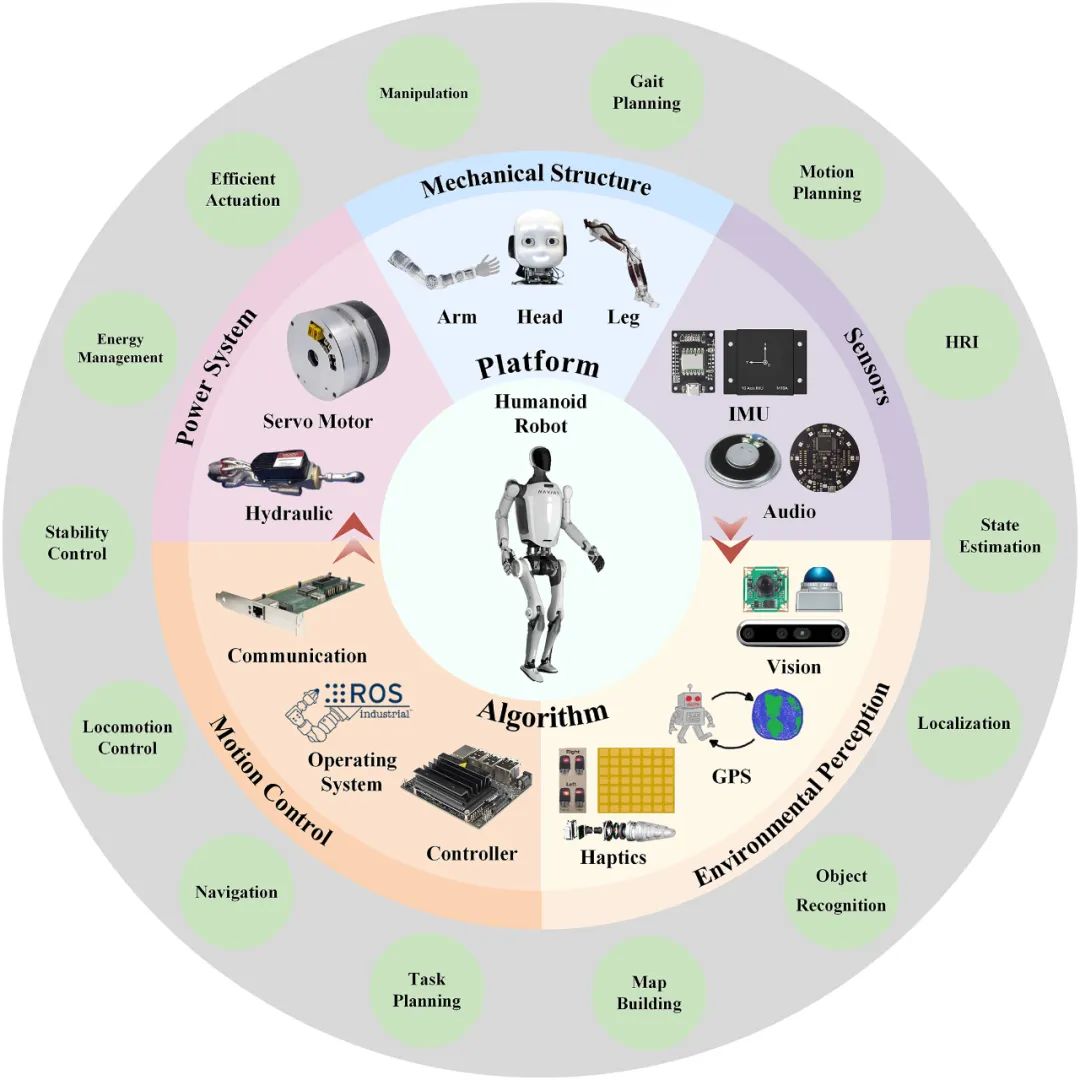
人形机器人是国家技术进步的关键领域,代表着一个充满希望的新兴产业,是未来经济和工业竞争的关键。这些机器人将对国家经济和社会发展产生深远影响。通过整合先进制造、新型材料和人工智能等前沿技术,人形机器人旨在模仿并最终超越人类能力。
人形机器人技术和产业在全球范围内正快速发展。2022年,特斯拉的Optimus首次亮相,重塑了人们对人形机器人功能边界的认知。2023年,大型语言模型的快速进步加速了具身智能的出现。目前,人形机器人正处于产业化前沿,展现出巨大的市场潜力。
实现人形机器人的广泛应用面临几个关键挑战:稳定的全身控制、智能升级、人机交互和系统集成。克服这些挑战是推动人形机器人进入主流应用的关键。
2. 人形机器人的发展历程
1969年,日本早稻田大学的Ichiro Kato创造了第一个双足机器人,它只有下半身,由液压和电缆牵引实现静态行走。1972年,第一个全身人形机器人问世。此后,人形机器人发展经历了几个阶段:从基础理论方法和系统形成,到关键技术的快速发展和系统多样化。目前,人形机器人已进入由应用驱动的产业化阶段,面向产品方向发展,未来有望实现低成本、大规模生产和应用。
国际代表性机器人
本田ASIMO:本田于1986年开始人形机器人研究,1996年开发出P2模型,2000年推出ASIMO。该机器人后来实现了9公里/小时的奔跑速度,掌握了单腿或双腿跳跃、爬楼梯以及各种交互技能,展示了踢球、拧瓶盖、倒水等任务。由于生产成本高和可扩展性有限,ASIMO项目于2018年终止。
波士顿动力Atlas:波士顿动力公司从2009年开始人形机器人研究,2013年发布了Atlas,专为灾难救援设计。十年间,公司在虚拟模型控制、非线性模型预测控制等方面取得突破,使Atlas能执行跑酷、舞蹈等复杂动作。2024年4月,波士顿动力推出完全电动版Atlas,关节可360°旋转。
特斯拉Optimus:特斯拉2022年推出Optimus原型机,2023年的Optimus Gen2实现了稳定行走、抓取物体,并使用自动驾驶技术进行环境感知和智能导航。
Figure AI:Figure AI发布的Figure 01展示了制作咖啡等能力。2024年3月,Figure AI与OpenAI合作,将多模态大型模型集成到Figure 01中,使其能实现环境感知、流畅人机对话等功能。
中国代表性机器人
中国在20世纪90年代开始了人形机器人研究,国防科技大学、哈尔滨工业大学、清华大学、北京理工大学和浙江大学等机构取得了重要研究成果。
北京理工大学汇童机器人:北京理工大学于2000年开始人形机器人研究,2001年发布了汇童bhr-1,该机器人可以独立行走,最高行走速度达2公里/小时。经过多次迭代,该机器人掌握了打太极拳、与人类打乒乓球和防跌倒等技能。
浙江大学悟空机器人:浙江大学开发的"悟空I"可以与人类或其他机器人进行数百回合的乒乓球比赛,引起了国际关注。"悟空IV"最高时速超过6公里/小时,跳跃高度为0.5米,可以爬上25°的斜坡和10厘米高的台阶,适应各种地形,包括户外表面、草地、泥地、楼梯和斜坡。
企业产品:优必选科技于2012年开始开发人形机器人产品,发布了Walker系列。2023年,宇树科技推出了H1,2024年发布了第二代人形机器人G1。此外,小米、傅利叶、追觅和小鹏等公司也发布了人形机器人原型或产品。
3. 人形机器人头部组件
随着人形机器人融入社会和家庭环境,机器人的头部,特别是面部,在传达情感、提供社交线索和建立人机交互中的信任方面发挥着关键作用。有效的设计必须在功能性和心理舒适性之间取得平衡,超越"恐怖谷"效应。
