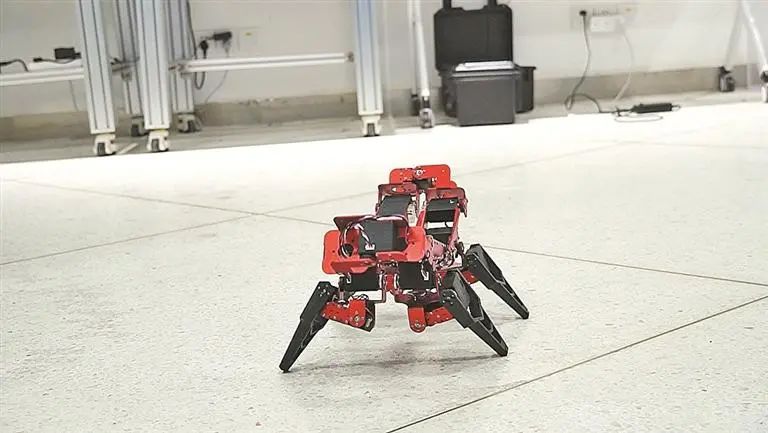
当算法智能和结构智能相结合,AI机器人会是什么样子?当机器人身处不同环境,能否变身,自主解决问题?日前,南科大一则科研成果视频引发关注。视频中,一款新型类生物变胞机器人,在无需拆卸和重装的情况下可实现爬行动物、节肢动物和哺乳动物等不同生物形式间转换。它时而缩成一团,时而呈小狗状、蜘蛛状,能钻进狭窄通道,也能攀爬阶梯等障碍。有网友表示:“这是新一代变形金刚。”“‘看我七十二变’被南科大实现了。”变胞机器人变成小狗的形状。深圳报业集团记者 张郗郡 摄
近日,记者来到南科大机器人研究院,向英国皇家工程院院士、欧洲科学院院士、南科大机械与能源工程系讲席教授、机器人研究院院长戴建生了解“变形金刚”诞生记。变胞机器人由基于变胞理论创成的多种机构构型组成。变胞机构是指能在瞬时使某些构件发生合并、分离,或出现几何奇异,并使机构有效构件数或自由度数发生变化,从而产生新构型的机构。就是人们口中常提到的“可塑性”。在生态环境恶化加剧和自然资源日益紧缺的情况下,各类机器人与机械设备对机构可重构能力与变结构特性的要求不断提高。这就需要对机器人骨架的机构进行创新设计,使其形态能够随意切换,具备执行多种任务的能力,实现一机多能,达到减少环境污染、能源消耗的效果。据戴建生介绍,1998年,他从生物学原理提出“Metamorphic Mechanisms”,1999年与中国工程院院士张启先共同确认其中文翻译为“变胞机构”。2000年,戴建生又发表了关于变胞机构构态模型的文章,由此掀起了国内外对变胞机构和各种新机构研究的热潮。2006年他提出可重构机构,在全球首届IEEE国际可重构机构与可重构机器人大会上,开创了可重构机构新领域。2020年,戴建生获得了国际机械设计最高奖:ASME机械设计最高奖,成为1958年以来该奖项的首位华人获奖者,以表彰其为建立可重构机构领域和变胞机构子领域作出的奠基性贡献。如今,变胞机构与可重构机构已成为国内外机构学与机器人学领域的研究热点。开启变胞机构的研究,源于一个香水盒。1996年,戴建生在研究香水包装盒折叠形状时,突发灵感,在生物演变原理基础上,提出了变拓扑和变活动度的变胞机构。