
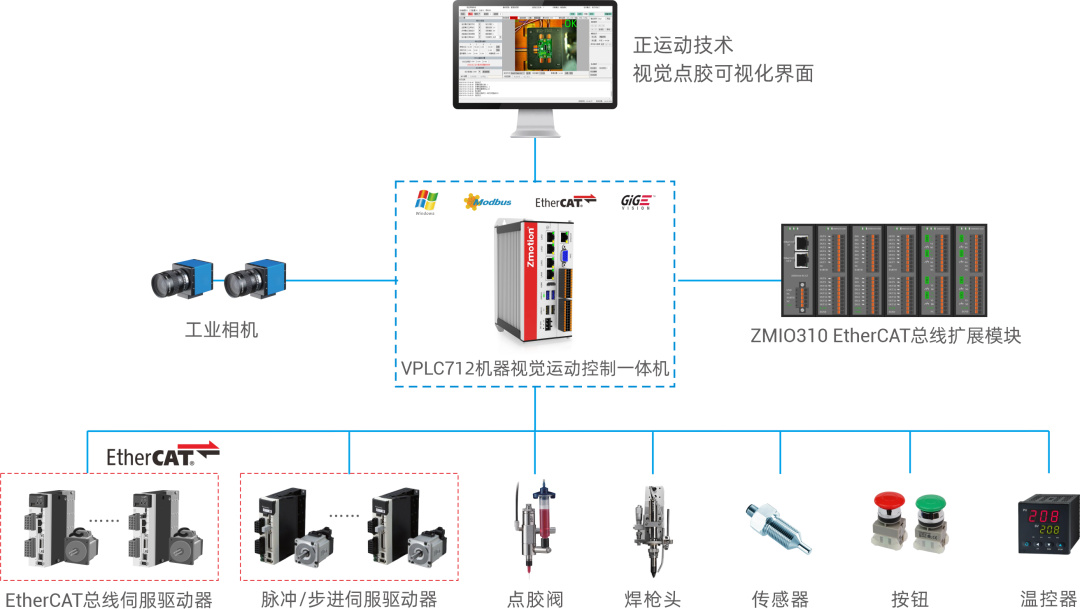
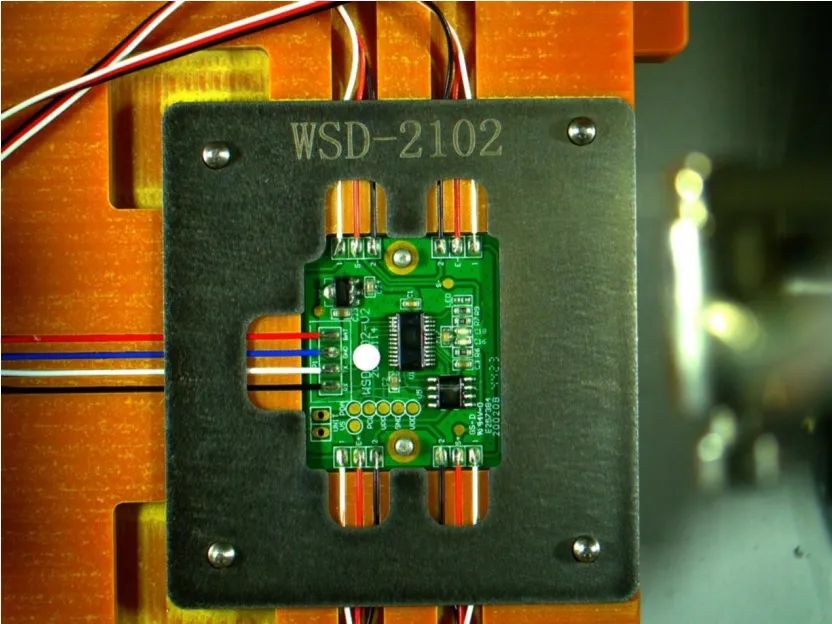
点胶与焊锡作为制造业自动化关键环节,专注服务电子、半导体、汽车及医疗等领域的高精密工艺需求。精密高速点胶焊锡解决方案通过实现高精高效的流体控制与焊接操作,助力企业实现生产效率与产品品质的双重提升。 ▲ 待加工的PCB板 ▲ 点胶焊锡设备介绍: 点胶机通过程序化控制点胶轨迹,实现对流体的精确控制,在加速作业的同时优化工作环境并减少人工干预。 自动焊锡机通过控制系统精准调控加热系统,对烙铁头实施加热,同时驱动运动轴将产品精确定位至目标位置。通过将固态的锡丝进行融化从而使得其变成熔化状态,涂敷在待连接的零部件焊盘上。 点胶焊锡一体机是集成点胶与焊锡功能的自动化设备,专为电子制造业设计,能有效提升生产效率和焊接品质。 正运动技术背靠背点胶焊锡机方案: 正运动技术推出的背靠背点胶焊锡机方案,在市面上常见的传统方案上新增了许多新功能,大大提高了设备的生产效率和产品的适应能力;增强设备的容错能力,设置检测功能,可预防和识别错焊、漏焊等问题。 机器视觉运动控制一体机在背靠背点胶焊锡机上的应用 正运动背靠背点胶焊锡机解决方案设计 20DI:接原点、限位等传感器,以及开关信号等; 2 20DO:高速输出口接工业相机的硬触发输入、焊枪头、夹紧气缸控制; 3 4路本地单端脉冲输出:接脉冲驱动器,控制轴运动; RS232通讯接口:接光源控制器、温控器; 5 EtherNET接口:千兆网口,接支持Gige协议的面阵相机,实现视觉定位的应用; EtherCAT接口:接EtherCAT总线伺服驱动器,控制轴运动。 机器视觉与运动控制工艺实现 | 机械视觉 主要使用了模板匹配功能,视觉对加工产品进行识别,通过预先设定好的特征,如形状、尺寸、Mark点,最后获取待加工产品的位置坐标,便于产品到达加工区域后,点胶头进行逐个产品的加工作业。 ▲ 加工产品 ▲ ▲ 机器视觉处理界面 ▲ | 运动控制 在PCB板点胶及焊锡设备中,运动控制配置是实现精确加工的核心模块。典型界面和功能包括: ● 视觉定位 ● 焊锡加工 ● 点胶加工 ● 回归待机位 ● 辅助功能配置 集成手动调试、I/O检测及工艺参数设置功能,支持气缸测试、限位调整、当量校准等设备调试需求,满足多样化生产场景适配要求。

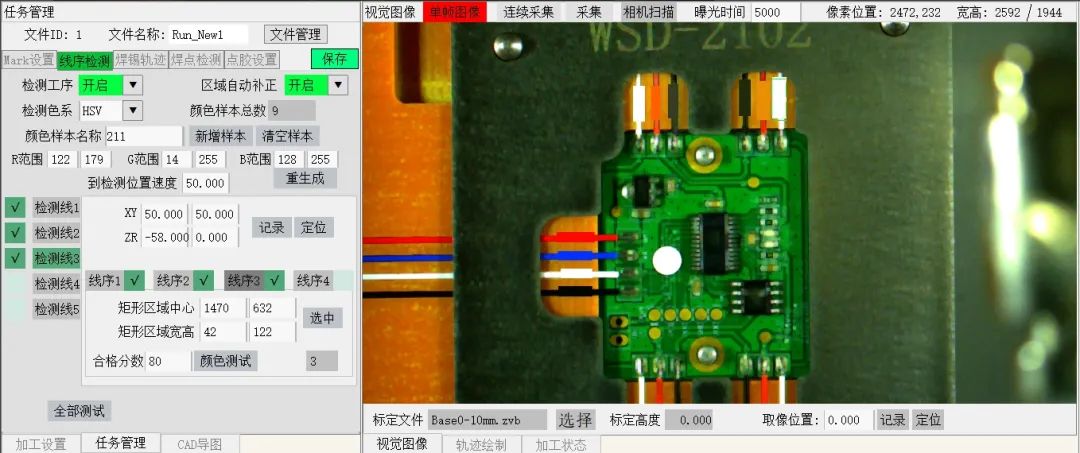
通过工业相机采集PCB板产品图像,结合CCD视觉定位与同轴光源进行图像处理与特征提取,确保点胶/焊枪头精准定位目标位置,提升定位可靠性和重复精度。
精确控制焊锡头的运动轨迹,可设定起止坐标、焊接速度、预加热以及后加热时间等参数。支持拖焊模式,沿预设路径焊接。
提供图形化编程界面设置点胶路径、速度及出胶量参数,支持连续/断续等点胶模式。可自定义点胶顺序和模式,并且支持调整点胶工艺参数。
任务完成后机械手臂返回预设待机位,采用内置运动算法确保平稳移动,避免机械碰撞。待机位设置于安全区域便于设备维护和物料更换。


